Skift sprog :
igus Robot Control-softwaren
Programmer, simuler og styr robotter uden licens
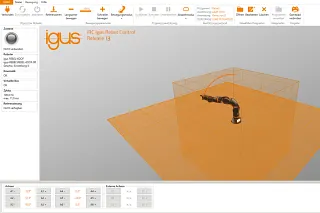
igus Robot Control-softwaren muliggør enkel og intuitiv programmering og styring af robotter, hvilket gør det nemt at komme i gang med automatisering. Takket være den modulære struktur kan forskellige robotkinematikker, f.eks. delta-robotter, lineære robotter og flerakset leddelte robotter, styres. Softwaren kan bruges til at simulere robotens individuelle bevægelser på 3D-overfladen – robotten behøver ikke at være tilsluttet i dette trin.
Hvad du finder på denne side
Gratis robotsoftware
Programmeringseksempler på forskellige applikationer med robotsystemet
- Enkel forbindelse mellem robot og styresystem
- Intuitiv betjening med 3D-grænseflade og digital tvilling muliggør direkte udførelse og kontrol af bevægelsessekvenser
- Konfiguration af kamerainterface direkte via styresystem og software
- Programmering af delta-, lineære, SCARA- og leddelte robotter
- Software muliggør risikofri testning allerede inden køb
Systemkrav:
- PC med Windows 10-operativsystem
- Kommunikation via Ethernet eller WLAN
- 500 MB ledig diskplads
Eksempelprogrammer, wiki og kurser



Grænseflader
PLC-grænseflader
PLC-grænsefladen (PLC = Programmable Logic Controller) muliggør udførelse af grundlæggende funktioner og signalering af tilstande ved hjælp af digitale indgange og udgange. Ud over styring via en PLC muliggør denne grænseflade også betjening via hardwareknapper.
Digitale ind- og udgange
Robotprogrammer kan indlæses og startes, og gribekommandoer kan sendes via digitale indgange eller globale signaler. Dette er nyttigt, hvis et program f.eks. skal vælges fra et givet udvalg ved hjælp af knapper eller CRI-GSig-instruktionen.
Modbus TCP/IP
Modbus TCP-grænsefladen kan bruges til at sende PLC-data og instruktioner til robotstyringssystemet og modtage statusoplysninger, for eksempel.
CRI-grænseflade
CRI-grænsefladen gør det muligt at sende komplekse instruktioner og hente information og indstillinger via Ethernet-grænsefladen ved hjælp af TCP/IP. igus Robot Control bruger denne grænseflade til at oprette forbindelse til robotter med et integreret styresystem eller andre eksemplarer af styresystemet.
Kamerainterface
Kamera-grænsefladen muliggør brug af objektdetektering og videokameraer. Objektdetekteringskameraer genkender objekters position og klasse og overfører disse, eventuelt med et videobillede, til styresystemet. Styresystemet beregner positioner i robotkoordinatsystemet ud fra kameraets objektpositioner. Rene videokameraer leverer kun billeder og kan derfor kun bruges til at overvåge arbejdsområdet, men ikke til at detektere objekter.
Sky
Cloud-grænsefladen gør det muligt at overvåge robotten via RobotDimension. Når robotten er aktiveret og logget ind, sender den grundlæggende statusoplysninger og kamerabilleder til onlinetjenesten. Brugeren kan liste sine robotter på hjemmesiden og hente oplysningerne.
ROS, Matlab, LabView og mange flere.
Integrer robotterne i dit ROS-miljø. Dokumentation og pakker til hardwarekommunikation, Teleop og moveI
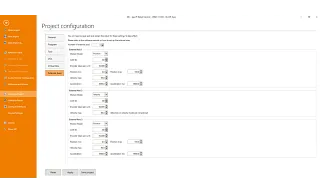
Projektkonfigurationer
Gripper
Det samlede værktøj kan specificeres her. Hvis værktøjet skiftes, skal projektet genindlæses, eller det integrerede styresystem skal genstartes. Nye værktøjer kan defineres som en konfigurationsfil i mappen "Data/Tools."
Virtuel boks
Robotarmens bevægelsesområde er begrænset af indstillingerne for den virtuelle boks. Denne funktion hjælper med at forhindre mekaniske skader og forenkler programmeringen, afhængigt af anvendelsen. Hvis der udføres et program, der overskrider den virtuelle boks, stoppes det med en fejlmeddelelse.
Ekstern akse
"Robotstyringssystemet understøtter op til 3 ekstra akser (også kaldet eksterne akser eller eksterne akse" er i iRC). Disse kan installeres i henhold til robotakserne og konfigureres via konfigurationsområdet i iRC.

Program
Her kan du definere robotten og logikprogrammet, bevægelseshastigheden (i procent af den maksimale hastighed), afspilningsfunktionen og reaktionen på programfejl.
Speciel kinematik
Robotstyringssystemet kan tilpasses din robot med en digital tvilling. Vi konfigurerer den inverse kinematik, så den passer til dit projekt.
Programmering
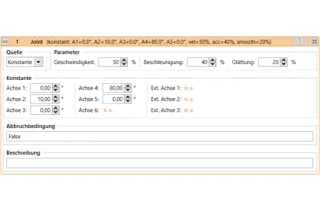
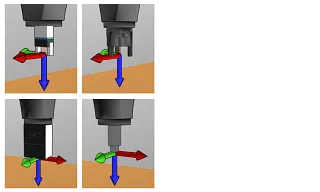
Akserbevægelser
Den fælles kommando flytter robotten til en absolut målposition, der er angivet i aksekoordinater (f.eks. aksevinkel eller position af en lineær akse). Den resulterende bevægelse af TCP er normalt en kurve og ikke en lige linje.
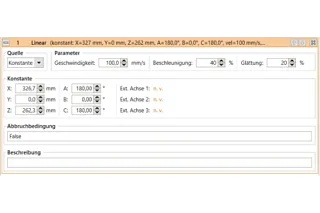
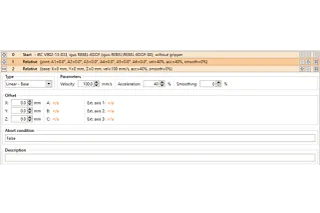
Lineær bevægelse
Kommandoen Lineær flytter robotten til en absolut målposition, der er angivet i kartesiske koordinater. Den resulterende bevægelse af TCP følger en lige linje.
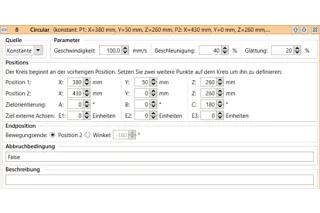
Cirkulære bevægelser
Instruktionen "Circular movement" muliggør bevægelser langs en hel eller delvis cirkulær bane. Den er kompatibel med lineære bevægelser, så overgangen fra og til lineære bevægelser kan udjævnes.
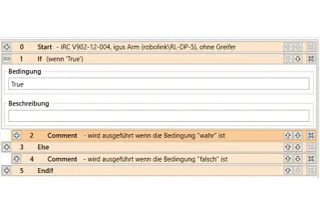
Betingelser
Betingelser kan bruges i if-then-else-kommandoer, sløjfer og som annulleringsbetingelser i bevægelseskommandoer. Betingelserne kan være kombinationer af digitale indgange, globale signaler, boolske operationer og sammenligninger.
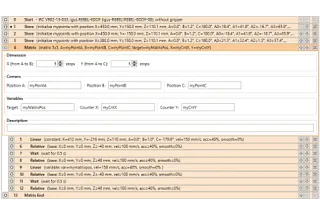
Matrixberegning
Gitterinstruktionerne beregner positioner, der er justeret i forhold til et gitter, f.eks. som en grib- eller aflægningsposition til palleteringsopgaver.
Relativ
Kommandoen Relative giver dig mulighed for at flytte robotten i forhold til dens aktuelle position. Den kan åbnes via menupunkterne under "Action" → "Relative movement".

Underprogrammer
Underprogrammer kan kaldes op med underkommandoen. Stien til underprogramfilen angives under " "" (Underprogramfilnavn) """ (Filnavn). Den er relativ til undermappen " "" (Programmer) "" " i iRC-mappen " "" (Data) """.
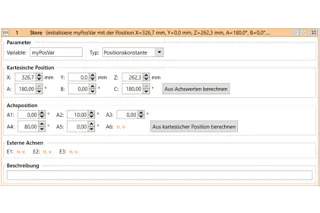
Variabler og variabeladgang
Der understøttes to typer variabler i programmet til igus Robot Control og TinyCtrl:
- Talvariabler: Disse kan bruges til at gemme heltal eller tal med flydende komma.
- Positionsvariabler: Disse kan bruges til at gemme kartesiske positioner og ledpositioner. Om en sådan variabel fortolkes som en kartesisk position eller en ledposition afhænger af konteksten.
Download robotsoftware

Den licensfri igus Robot Control-software er integreret i styresystemet og bruger derfor et standardiseret betjeningskoncept og ensartede kommunikationstjenester til mange komponenter i ét system. Det betyder mindre projektplanlægningsarbejde og hurtigere idriftsættelse.
- Test alle igus-kinematikker på forhånd i softwaren
- Med forprogrammerede projekter til alle igus-robotter, enkeltakser og AGV'er
- Intuitiv 3D-grænseflade med simulering af robotten
Rådgivning
Jeg vil med glæde besvare deres spørgsmål personligt.
Levering og vejledning
Personlig betjening:
Mandag til fredag fra 7:00 til 20:00.
Lørdag fra 8:00 til 12:00.
Online:
24h